11.1. Apollo의 좌표계는 어떻게 정의됩니까?
Apollo에서는 어떤 좌표계가 사용되며, 그것들은 어떻게 정의됩니까?
유지 관리자: <daohu527@gmail.com>
버전: 1.0.0
날짜: 2024년 5월 9일
설명:
11.1.1. 답변
Apollo 프로젝트에서는 여러 가지 좌표계가 사용되며, 각각 특정 정의와 적용 시나리오가 있습니다. 다음은 Apollo에서의 일반적인 좌표계와 그 정의입니다:
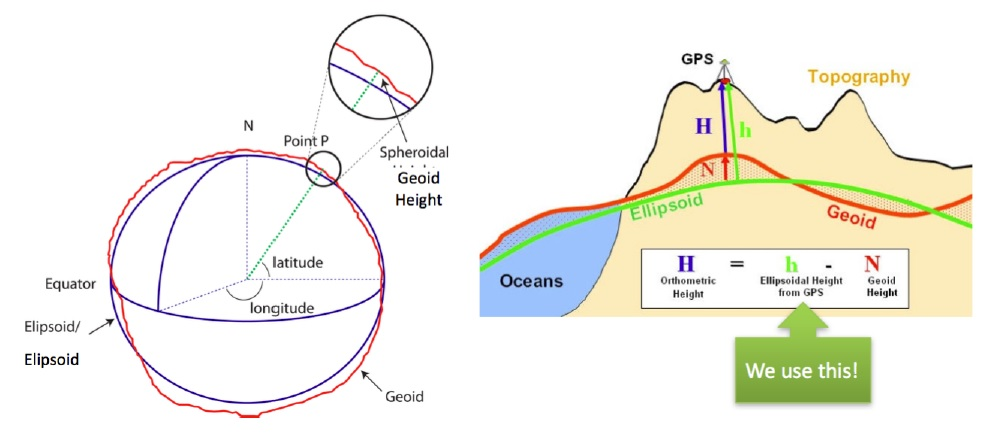
11.1.1.1. 전세계 지리 좌표계
Apollo는 **WGS84 (World Geodetic System 1984)**를 표준 좌표계로 사용하여 물체의 경도와 위도를 나타냅니다. WGS84는 지구의 타원체를 기준으로 하는 좌표계로, 경도와 위도의 두 각도 값을 사용하여 북극점을 제외한 지구 표면상의 모든 점을 고유하게 결정합니다. 경도는 동서 방향의 위치를 나타내며, 범위는 -180°에서 180°입니다; 위도는 남북 방향의 위치를 나타내며, 범위는 -90°에서 90°입니다.
WGS84 좌표계는 지도 작성, 위치 지정, 내비게이션 등 지리 정보 시스템(GIS) 서비스에 널리 사용됩니다.
world_geodetic_system
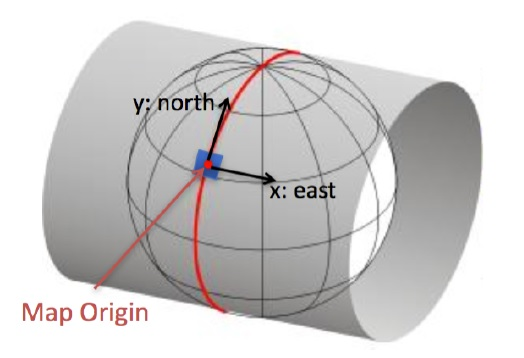
11.1.1.2. 국소 좌표계
국소 좌표계는 지구 표면의 특정 점을 원점으로 하는 3차원 데카르트 좌표계로, X축은 동쪽, Y축은 북쪽, Z축은 하늘을 향합니다. 이는 차량이나 센서와 같은 이동 물체의 상대 위치를 나타내는 데 일반적으로 사용됩니다.
유니버설 횡단 메르카토르(UTM)는 지구 표면을 60개의 지역으로 나누는 2차원 투영 좌표계입니다. 각 지역은 프로젝션 밴드라고 하며, 너비는 6도 경도이고, 횡단 메르카토르 투영이 사용됩니다.
Apollo 시스템에서는 UTM 좌표계가 위치 지정 및 계획 등의 모듈에서 국소 좌표계로 사용됩니다.
local_coordinate_system
11.1.1.3. 차량 좌표계
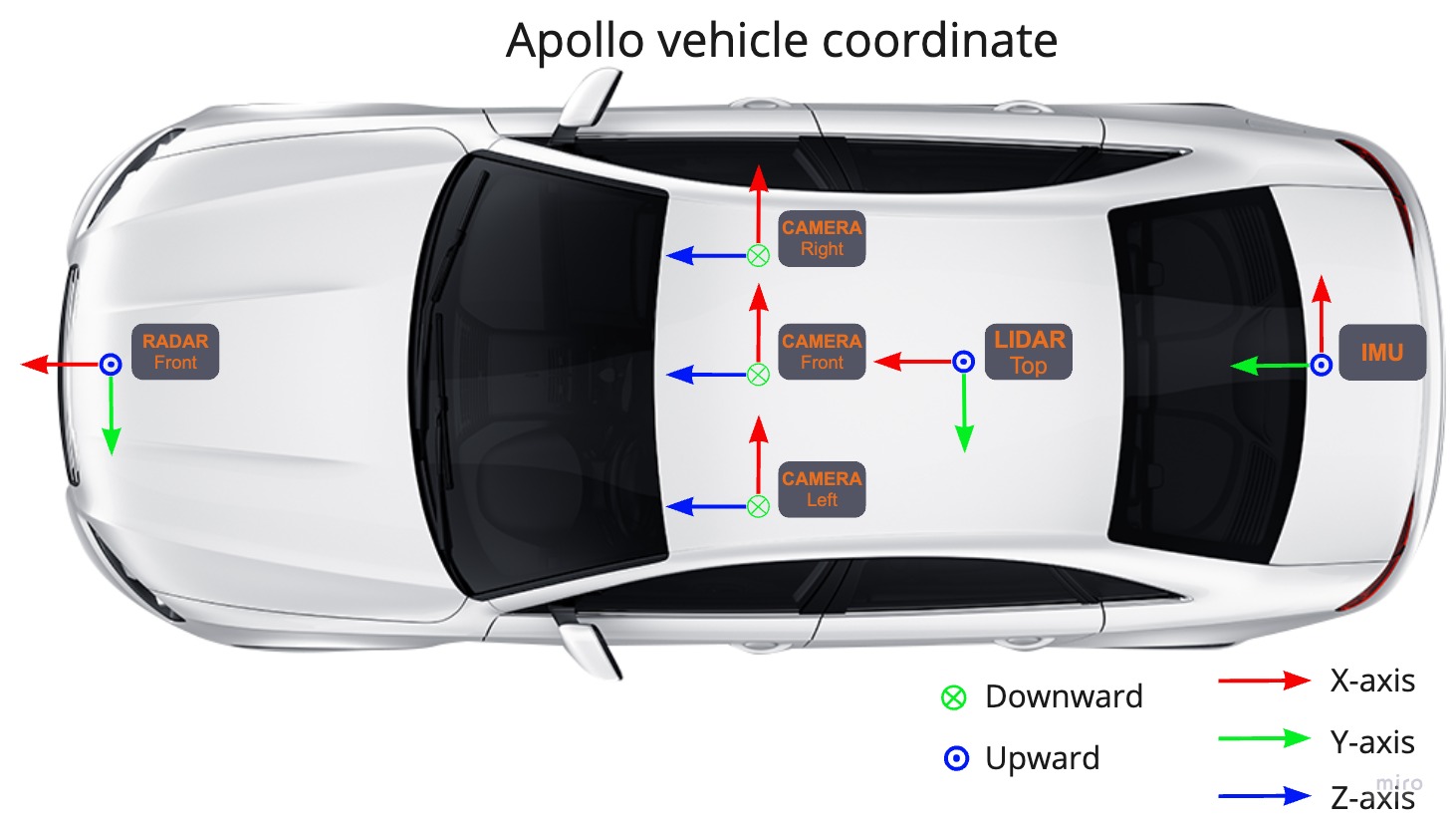
vehicle_coordinate_system
이것이 Apollo 프로젝트에서의 일반적인 좌표계와 그 정의입니다. 이러한 좌표계는 자율 주행 시스템의 다양한 모듈, 지도 위치 지정, 차량 제어, 환경 인식 등에서 중요한 역할을 합니다. 이러한 좌표계를 효과적으로 사용함으로써 자율 주행 시스템 내의 다양한 기능을 효율적으로 실현할 수 있습니다.