1. Apolloの座標系はどのように定義されていますか?
Apolloではどのような座標系が使用されており、それらはどのように定義されていますか?
メンテナー:<daohu527@gmail.com>
バージョン:1.0.0
日付:2024年5月9日
説明:
1.1. 回答
Apolloプロジェクトでは、さまざまな座標系が関与しており、それぞれ特定の定義と適用シナリオがあります。以下はApolloでの一般的な座標系とその定義です:
1.1.1. 全球地理座标系
Apolloは**WGS84(World Geodetic System 1984)**を標準座標系として、物体の経度と緯度を表現しています。WGS84は地球の楕円体を基準とする座標系で、経度と緯度の2つの角度値を使用して、北極点以外の地球表面上のすべての点を一意に特定します。経度は東西方向の位置を表し、範囲は-180°から180°です。緯度は南北方向の位置を表し、範囲は-90°から90°です。
WGS84座標系は、地理情報システム(GIS)サービス、地図作成、位置決め、ナビゲーションなどに広く使用されています。
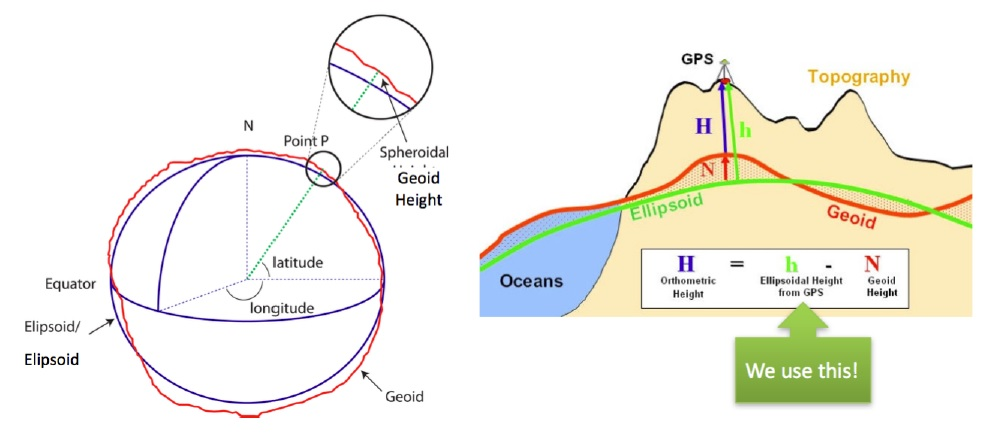
world_geodetic_system
1.1.2. 局所座標系
局所座標系は、地球表面の特定の点を原点とした三次元デカルト座標系で、X軸は東、Y軸は北、Z軸は天を指します。これは、車両やセンサーなどの移動物体の相対位置を表すのに一般的に使用されます。
ユニバーサル横メルカトル(UTM)は、地球表面を60の区域に分割する二次元投影座標系です。各区域はプロジェクション帯と呼ばれ、経度6度の幅を持ち、横メルカトル投影が使用されます。
Apolloシステムでは、UTM座標系が局所座標系として位置決め、プランニングなどのモジュールで使用されます。
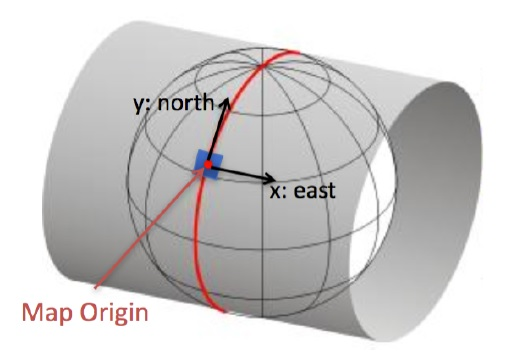
local_coordinate_system
1.1.3. 車両座標系
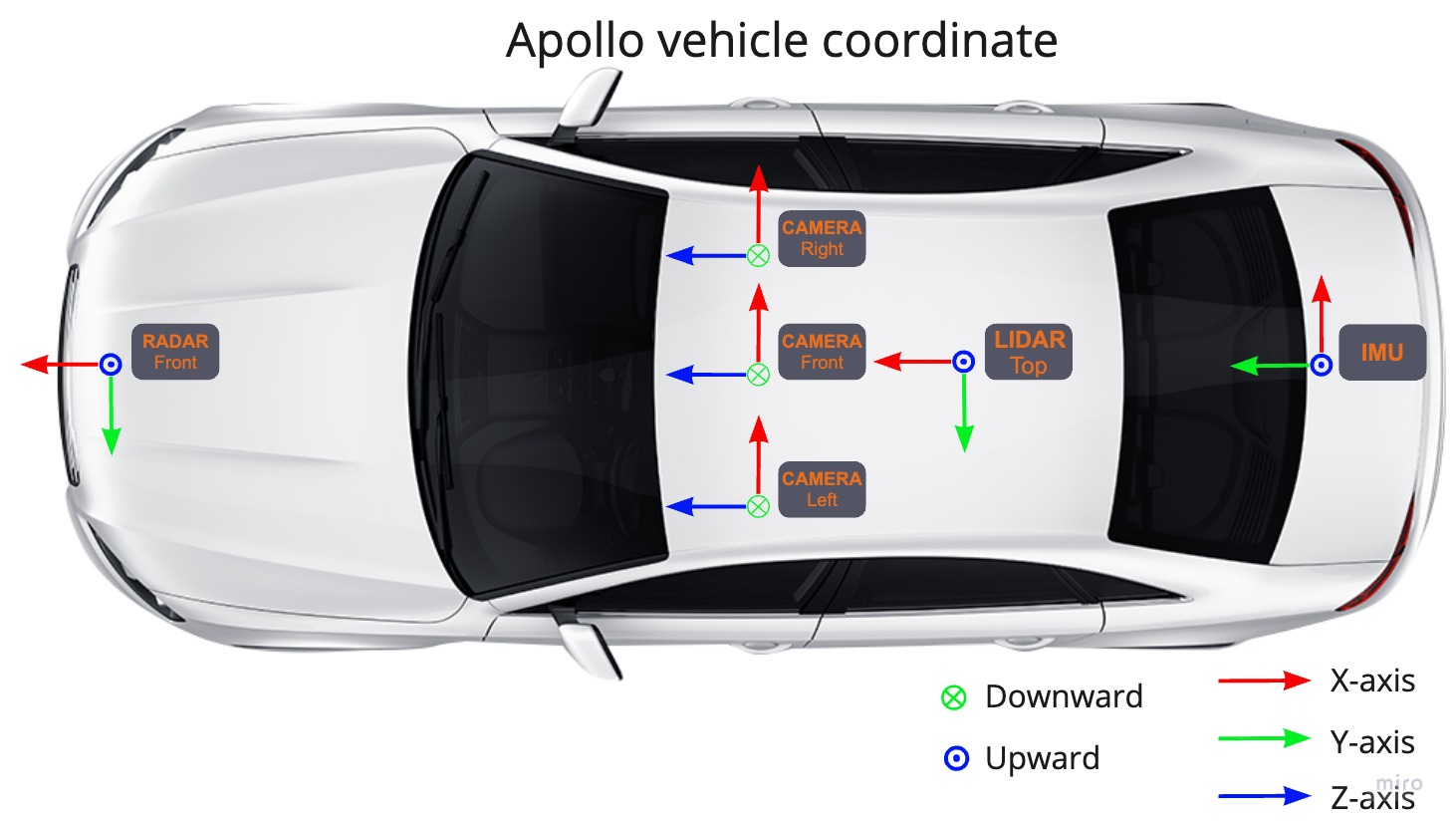
vehicle_coordinate_system
これがApolloプロジェクトでの一般的な座標系とその定義です。これらの座標系は、自動運転システムのさまざまなモジュール、地図位置決め、車両制御、環境認識などで重要な役割を果たしています。これらの座標系を適切に使用することで、自動運転システム内のさまざまな機能を効率的に実現できます。